Bij S.Bus wordt via een enkelvoudige seriële overdracht alle beschikbare kanalen beschikbaar gesteld.
Hierdoor kunnen meerdere servo's via een enkele signaal draad aangestuurd worden. De servo moet dan geprogrammeerd worden voor een bepaald kanaal. Voordeel van dit systeem is dat er hierdoor minder bedrading nodig is in het toestel. Alle servo's kunnen op de zelfde voeding en massa aangesloten worden en ook een enkele signaal draad volstaat, dus als een toestel bijvoorbeeld, rolroeren, landingskleppen, motoren en verlichting in de vleugel heeft is dit alles aan te sturen met een simpele drie draads aansluiting. Zie onderstaande afbeelding.

Nou is de ontvanger die ik in de Piper Cub heb ingebouwd ook uitgerust met deze S.Bus. Tijd dus om eens te proberen wat de mogelijkheden zijn met S. Bus.
Na wat zoek werk op internet vond ik een stukje C Code voor een Arduino om de beschikbare 16 kanalen op de S.Bus om te zetten naar PWM signalen voor de aansturing van 16 servo's. Verder een kleine schakeling om het S.Bus signaal om te zetten naar een signaal waar de Arduino mee om kan gaan. Het S.Bus signaal is namelijk bijna gelijk aan een standaard serieel signaal wat bij microprocessors wordt toegepast, namelijk UART. Het grootste verschil is de waardes van 1 en nul. Bij de UART standaard is een 1 een hoge spanning en een 0 een lage spanning. BIj de S.Bus is dit net andersom. Door het S.Bus signaal via een transistor schakelingetje te inverten, kan de Arduino dit signaal eenvoudig uitlezen op zijn Rx ( Receive ) ingang.
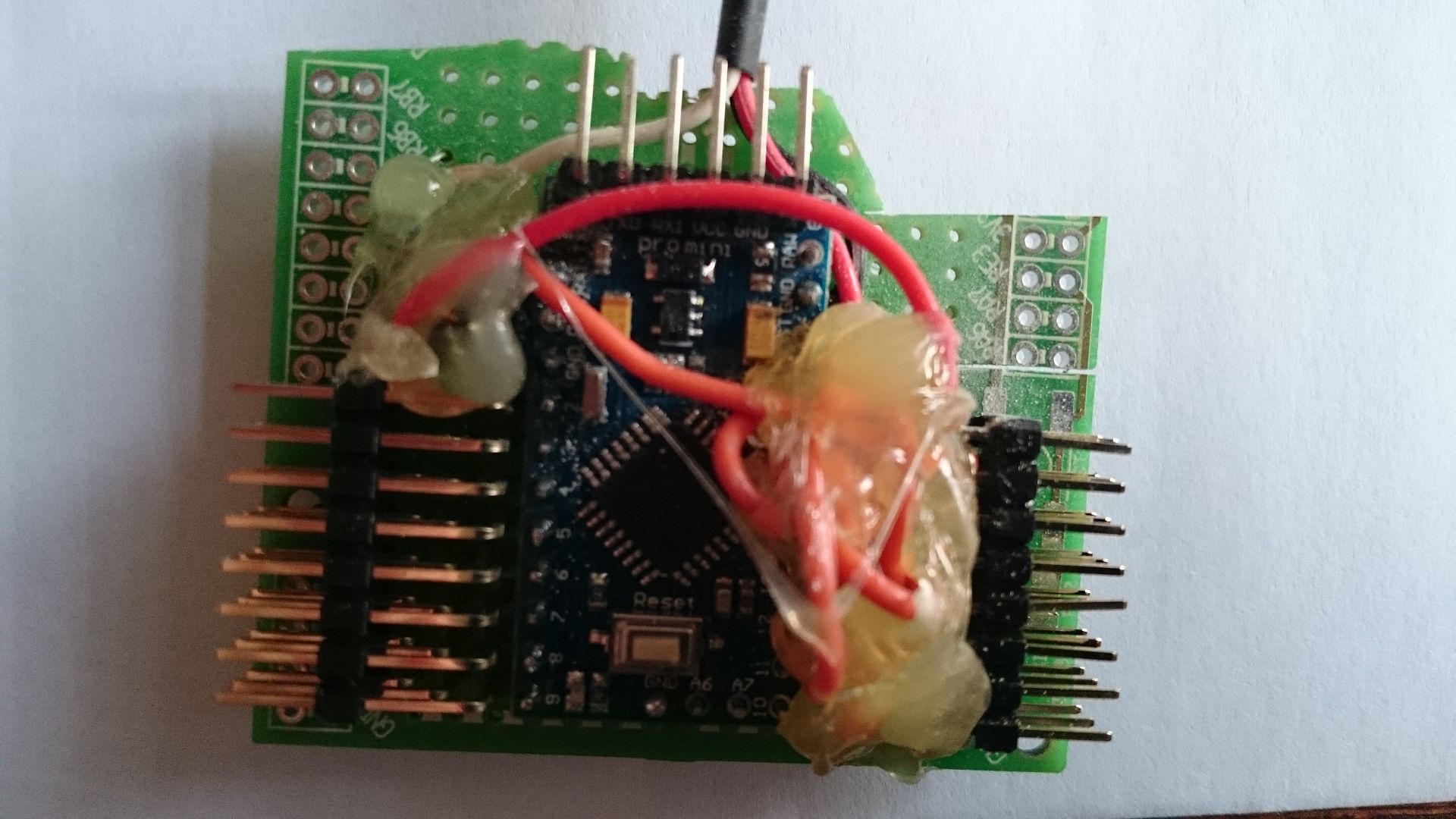
Resultaat is een klein bordje met hierop 16 servo uitgangen voor standaard servo's. Deze servo's kunnen worden aangestuurd met de Taranos zender.
Mooi dat het werkt maar wat kan je hier nu eigenlijk mee.
- - Voor de Piper bied het niet zoveel extra's behalve dan dat ik nu nog 8 kanalen overheb voor toekomstige functies ( IK zou niet weten wat op dit moment)
- Voor grotere toestellen kan het praktisch zijn om een S.bus converter dicht bij de servo locatie te hebben en dus met een enkele servo kabel naar de staart te gaan bijvoorbeeld en daar het S.Bus signaal om te zetten naar PWM voor de betreffende servo's.
- is het een goedkope manier om naast de standaard 8 kanalen uit de ontvanger, 8 extra kanalen ter beschikking te krijgen.
- Het is met deze simpele schakeling ook mogelijk om eens standaard aan te passen naar een S.Bus servo. De gebruikte Arduino Pro Mini is zeer compact dus zou prima onder de behuizing van de servo gelijmd kunnen worden.
Dus als je zelf zoiets wilt maken. IK heb de code en die is vrij beschikbaar. Verder heb je nodig: Een Arduino Pro Mini ( 2 euro) een transistor ( .50 euro) en twee weerstanden ( .30 euro) en een servo kabeltje voor aansluiting op de S.Bus uitgang van de ontvanger.
En hier is het resultaat.